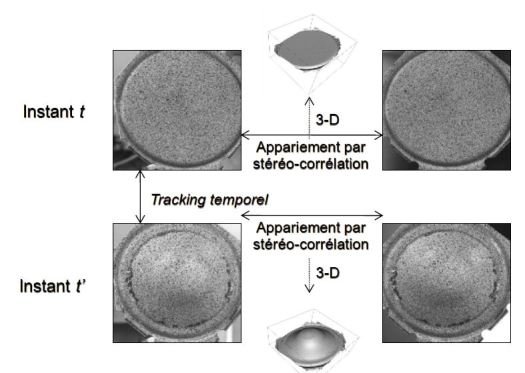
La stéréo-corrrélation
Intérêt ?
A l'instar de la vision humaine, les deux caméras fournissent assez d'information pour percevoir l'environnement en trois dimensions

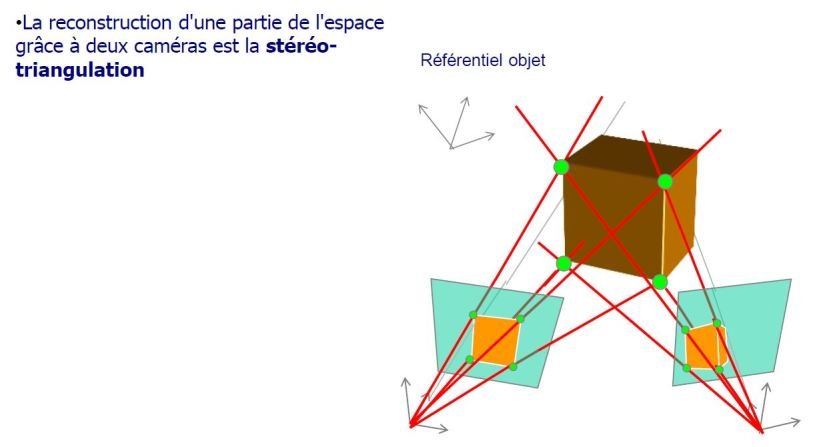
stéréo-triangulation
•La reconstruction d'une partie de l'espace grâce à deux caméras est la stéréo-triangulation
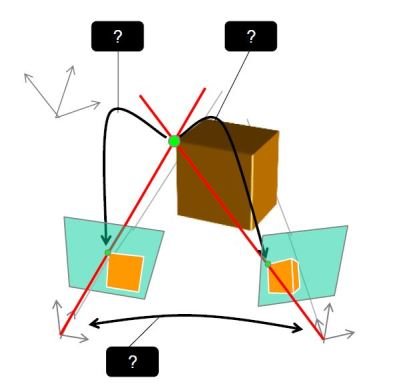
Problème
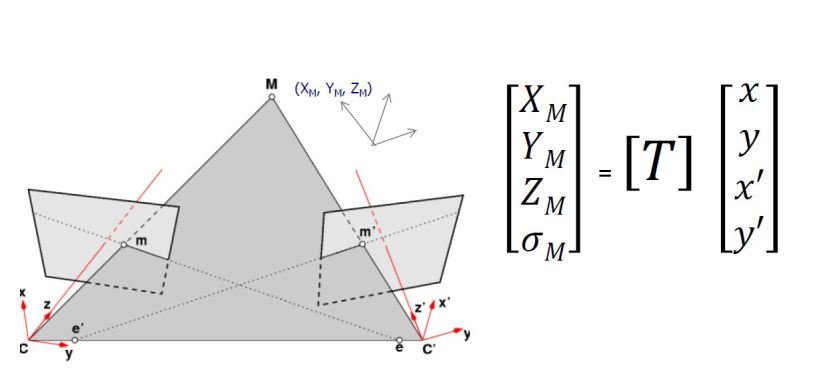
• La stéréo-triangulation est calculée à partir de l'intersection de 2 rayons optiques
• Cela n'est réalisable que si un système de coordonnées unique est défini
• Il faut modéliser et étalonner le montage stéréo
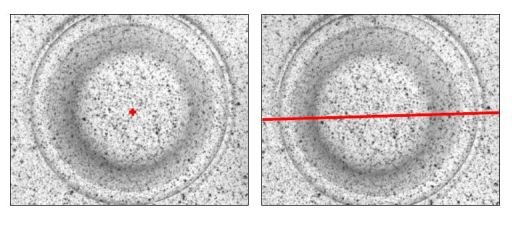
Contrainte épipolaire
Contrainte épipolaire : un point m de l'image gauche correspond à un point m' de l'image droite. localisable sur une ligne droite appelée sa droite épipolaire
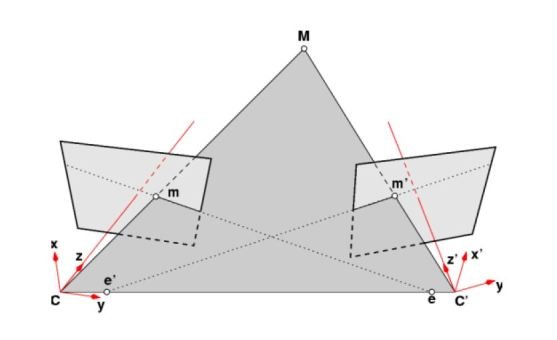
fonction de transfert
Les coordonnées du point M sont reliées aux positions de ses images m et m' sur les capteurs des 2 caméras par la matrice fondamentale [T] ou fonction de transfert :
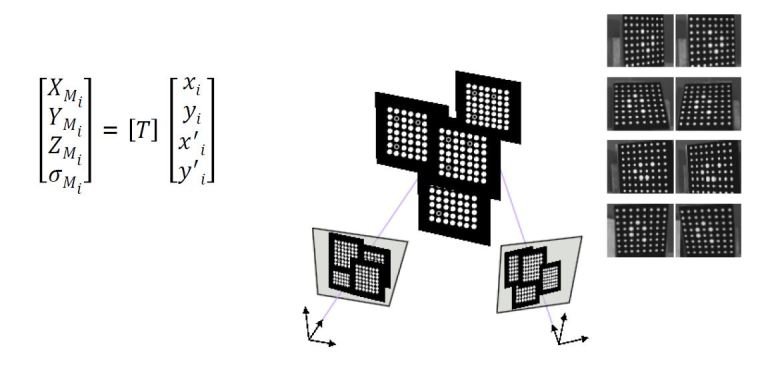
Étalonnage
Étalonnage = Estimation de la fonction de transfert [T] par la résolution des équations matricielles pour différentes prises de vue de mires géométriquement définies
•Eclairage uniforme sans reflet pour une extraction fiable des positions des points de la grille
•L'étalonnage requiert l'acquisition d'images prises suivant un maximum d'angles de rotation de la grille (volume équivalent)
Correspondance
• La recherche de correspondance des points entre les deux images utilise cette particularité des droites épipolaires
• Cela accélère notablement l'algorithme de stéréo-triangulation
CORRELATION 3D D'IMAGES NUMERIQUES :
2 étapes :
– Stéréo-corrélation
– Stéréo-triangulation (nécessite un étalonnage)